As mentioned in a previous post, it is important for hearing aids that the microphones and electronics have a low self-noise. Because of the amplification in a hearing aid, what might start as an innocuous amount of noise gets multiplied into a very annoying and fatiguing listening experience. So, for our next revision of Tympan (Tympan Rev-D2), we're looking to further reduce the self-noise of the system. We are considering an on-board microphone that should offer 5dB less self-noise than the existing design (Tympan Rev-C). Instead of taking their word for it, let's place the Tympan mics in a super quiet room and see what happens.

Backstory: The current release of Tympan is "Rev-C". It is a fine system, though a bit bulky. Rev-C is bulky because it is composed of two separate boards: the Teensy 3.6 and the Tympan audio board. To reduce the bulk, we've smashed them together into one board. This is our new "Rev-D". The first version (Rev-D1) is otherwise identical to Rev C -- it has the same on-PCB microphones and the same audio interface. It appears to have the same performance as Rev-C, which is what we expected. With that success, we're now trying to further improve the system by focusing on its self-noise. That's Rev-D2. For Rev-D2, we're using quieter on-PCB microphones and we've added an additional (hopefully even quieter) pre-amplifier for the mics. We'll see!
Goal: Today's goal is to compare the self-noise of the new Rev-D2 to the existing Rev-C/Rev-D1. We expect to see that D2 is quieter, primarily due to its quieter on-PCB microphones. From the datasheet specs (below), the proposed mic should offer a significant reduction in self-noise (-5dB) (measured at 1kHz), compared to the existing mic. While comparing Rev-D2 to Rev-C/Rev-D1, we'll also compare to a laboratory grade reference microphone from B&K.

Backstory: The current release of Tympan is "Rev-C". It is a fine system, though a bit bulky. Rev-C is bulky because it is composed of two separate boards: the Teensy 3.6 and the Tympan audio board. To reduce the bulk, we've smashed them together into one board. This is our new "Rev-D". The first version (Rev-D1) is otherwise identical to Rev C -- it has the same on-PCB microphones and the same audio interface. It appears to have the same performance as Rev-C, which is what we expected. With that success, we're now trying to further improve the system by focusing on its self-noise. That's Rev-D2. For Rev-D2, we're using quieter on-PCB microphones and we've added an additional (hopefully even quieter) pre-amplifier for the mics. We'll see!
Goal: Today's goal is to compare the self-noise of the new Rev-D2 to the existing Rev-C/Rev-D1. We expect to see that D2 is quieter, primarily due to its quieter on-PCB microphones. From the datasheet specs (below), the proposed mic should offer a significant reduction in self-noise (-5dB) (measured at 1kHz), compared to the existing mic. While comparing Rev-D2 to Rev-C/Rev-D1, we'll also compare to a laboratory grade reference microphone from B&K.
| Design | Microphone | Mic Sensitivity dBV/Pa |
Self-Noise (dBA) |
|---|---|---|---|
| Existing Mic (Rev-C/Rev-D1) |
Knowles SPH1642HT5H-1 |
-38 @ 1kHz | 29 |
| Proposed Mic (Rev-D2) |
Knowles SPM0687LR5H-1 |
-32 @ 1kHz | 24 |
| Reference Mic | B&K 4191 | -38 @ 250Hz | 20 |
Setup
Approach: The first step is calibrating each Tympan's microphone so that we know how to interpret the recorded audio. By calibrating each Tympan's microphone, we can express the apparent self-noise levels in terms of apparent sound pressure level (SPL), which is a good way of doing an apples-to-apples comparison across systems. After we've calibrated the Tympan systems, we'll put the Tympan's into a quiet sound room to (hopefully) measure their self-noise. Ideally, the ambient noise in the sound room will be low enough to discern the self-noise of the on-board microphones.Hardware: We used a Tympan Rev-D1 and a Rev-D2. We also recorded the ambient sound levels using our laboratory-grade reference microphone, a B&K 4191 along with a National Instruments data acquisition system.
Gain Settings: In addition to the new microphone on Rev-D2, the Rev-D2 also features a new preamp between the microphone and the Tympan's audio interface chip (a TI AIC3206). The pre-amp provides about 15 dB of additional gain via an amplifier that we believe to be quieter than the programmable gain in the AIC3206. Therefore, for the testing with the Rev-D2, we turned down the gain on the AIC3206 by 15 dB, which should make the overall gain between the Rev-D1 and Rev-D2 about the same.
Physical Setup: The sound recordings were made in a single-walled, acoustic test chamber, which is fairly quiet above 125 Hz. As shown in the figure at the top of this post, the lab-grade B&K microphone was positioned 1" above the Tympan's on-board PCB mic so that it is placed along the same axis as the mic under test.
Tympan Setup. The Tympans were configured to record from their on-PCB microphones. They were configured to use a sample rate of 44.1 kHz and to write their raw audio data straight to the Tympan's SD card. The Tympan Arduino code is here on GitHub. The Tympans were running on their battery power.
Calibration
To calibrate the microphones across a wide frequency spectrum (125Hz-22kHz), white noise was created in an audio effects editor and played through 4 speakers in the sound room. The speakers were pointed in different directions to create a diffuse, rather than directional, sound field.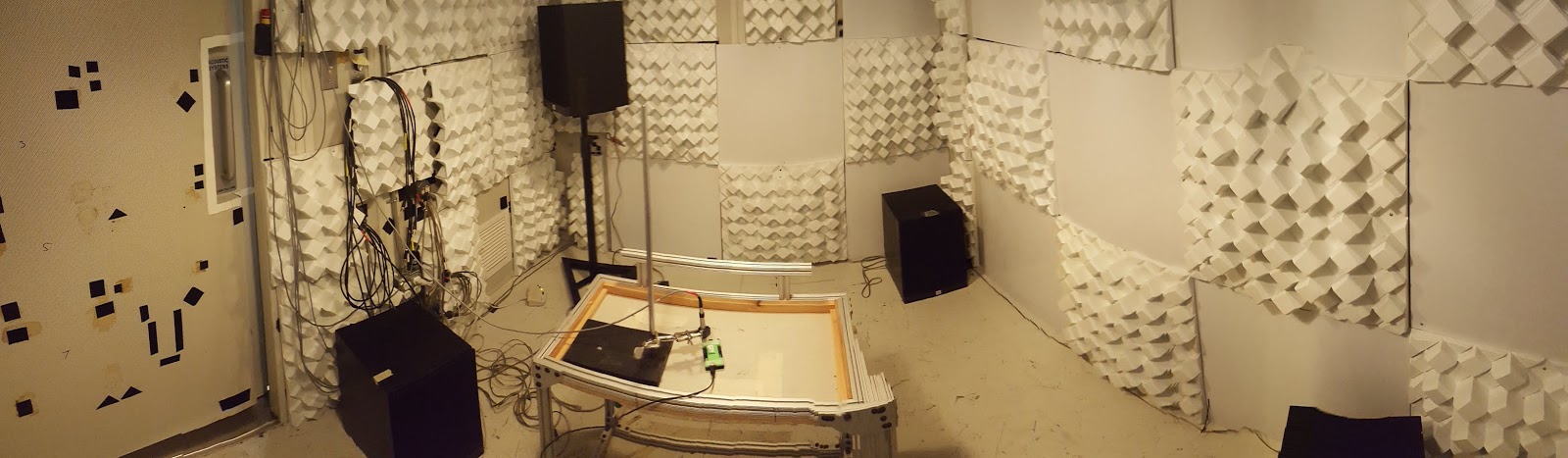
To define the Tympan's frequency response from 125Hz to 16kHz, the Tympan output was filtered by octave-bands, then the RMS value was taken and converted to a dB log scale that references the Tympan's Full Scale Output (+1.0).
Sensitivity for a digital microphone is often reported as the output at 94dB SPL (i.e. 1 Pa), compared to its full-scale output:
This sensitivity can be rephrased in terms of the dB log scale:
The figure below shows the raw microphone response and the derived sensitivity. At 1kHz, the proposed microphone (D2) is less sensitivity (-1.8dB) than the existing microphone (D1), which is expected.

Self-Noise
Now that the microphones are calibrated, we can take a recording of a quiet sound room with the mics under test and relate that to an equivalent sound pressure level. The same analysis was applied as before: the recording was filtered into octave bands then the RMS value was taken for each band.
From the figure below, the proposed mic shows a 1.5dB reduction in self-noise at 1kHz, compared to the existing mic. We can also report the A-weighted average by applying a correction to the RMS value for each octave band (as described here). That shows a 1.7dB reduction in A-weighed self-noise.

From the figure below, the proposed mic shows a 1.5dB reduction in self-noise at 1kHz, compared to the existing mic. We can also report the A-weighted average by applying a correction to the RMS value for each octave band (as described here). That shows a 1.7dB reduction in A-weighed self-noise.
Conclusion
The self-noise of the proposed microphone offers a small improvement in self-noise (2dB) which is less than that expected from the datasheets (5dB). As a follow-up, it will be interesting to see if this is due to the thermal noise of the microphone, or self-noise in the front-end electronics.






